购物中心
|
搜又搜
|
设为首页
|
加入收藏
|
与我交流
|
云上文章
首页
服饰
数码
化妆
母婴
食品
文体
家居
其他
特卖
当前位置:
首页
>
逸家购物
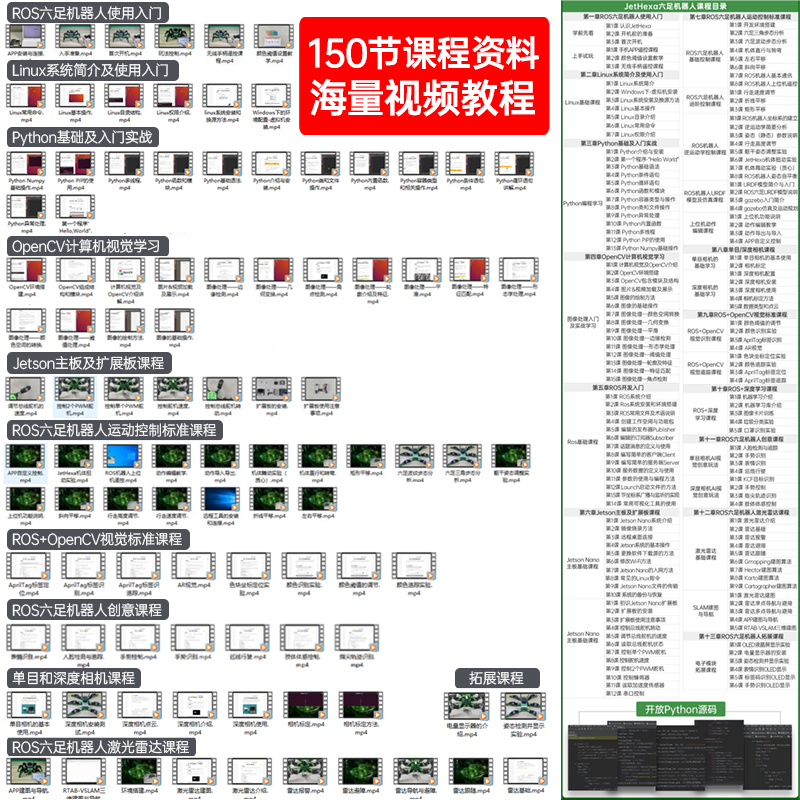
ROS机器人JetHexa视觉六足仿生蜘蛛SLAM雷达建图导航JETSON NANO
时间:2024-06-02 来源:
搜又搜
作者:
easyfami
导言
ROS机器人JetHexa视觉六足仿生蜘蛛SLAM雷达建图导航JETSON NANO
亚博智能 AI视觉识别四足机器狗仿生机械ROS建图导航SLAM树莓派5
树莓派4B六足机器人SpiderPi Pro套件编程视觉识别机械臂追踪抓取
亚博智能 六足仿生蜘蛛机器人AI视觉识别树莓派5编程jetson nano
微雪 WAVEGO 12自由度仿生四足机器狗 基于树莓派开源 人脸识别
相关信息:
亚博智能 ROS六足蜘蛛机器人SLAM雷达建图导航jetson nano树莓派5
阿克曼ROS2机器人差速无人小车麦克纳姆轮树莓派开源SLAM建图导航
ROS2机器人ROS小车阿克曼无人驾驶Jetson nano麦克纳姆轮建图导航
机械手臂Arduino/STM32/51单片机开源6六轴自由度机械臂套件km1
开源智能搬运机器人 STM32可编程机械臂循迹避障小车底盘比赛Cm1
树莓派5机械手臂 ROS编程机器人AI视觉语音识别moveit训练python
亚博智能 机械手臂AI视觉识别ROS机器人jetson nano树莓派moveit
松甲 开源仿生机械手臂机械手掌 stm32编程体感机器人机械臂
四足机器人爬行机械狗BeeDog仿生4足 行星减速电机可编程二次开发
6自由度机械臂Jetson nano机器人ROS麦轮无人小车Moveit 视觉抓取
机械手臂 开源仿生机械手掌mini arduino体感控制编程机器人
写字机器人自动智能打字仿手写教案笔记填表格画图翻页神器写字机
亚博智能 树莓派5机械手臂AI视觉识别ROS机器人jetson nano可编程
微雪 4-DOF大扭矩总线舵机机械臂 ESP32 轻量化可扩展提供例程
仿生蜘蛛机器人六足开发套件可编程创客教育智能机器人比赛diy
微雪 4自由度大扭矩总线舵机桌面机械臂套件ESP32上位机ROS2编程
设为首页
|
加入收藏
|
关于本站
|
免责申明
|
联系站长
|
友情链接
Copyright© 2007-2020 www.soyouso.com .All Rights Reserved